
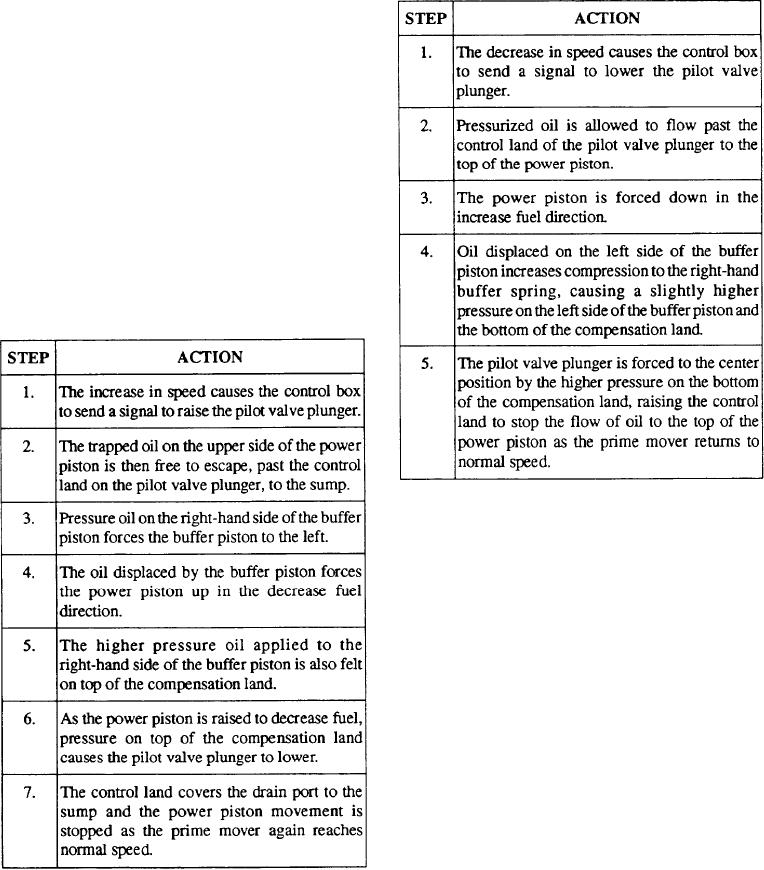
The following will occur if there is an increase in
The hydraulic actuator (fig. 9-4) controls the
load:
position of the prime mover fuel or steam supply valve
through the flow of oil to and from the upper side of the
power piston in the remote servo. The output signal
from the electronic control box is applied to a two-coil
solenoid surrounding the armature magnet of the pilot
valve plunger. This produces a force, proportional to
the current in the coil, that moves the armature magnet
and, in turn, moves the pilot valve plunger up or down.
An electronic amplifier is housed in the electronic
control box (fig. 9-1). When a positive dc voltage is sent
to the actuator from the control box, the pilot valve
travels in a downward direction. If a negative dc voltage
is sent to the actuator from the electronic control box,
the pilot valve plunger will travel in an upward direction.
With the pilot valve plunger centered, no oil flows
to or from the upper side of the power piston. The
following will occur if there is a decrease in the load
Stability of the system is controlled by the electric
governor section. It is enhanced by the temporary
feedback signal in the form of a pressure differential
applied across the compensating land of the pilot valve
plunger. The pressure differential is derived from the
buffer system and is allowed to fade away, as the engine
returns to normal speed, by the needle valve.
The power piston and its piston rod are surrounded
by seal grooves. These seal grooves are used to ensure
that any leakage of pressure oil from the power piston
comes from a part of the hydraulic circuit where it will
do no harm.
Hydraulic Amplifier
The hydraulic amplifier is a linear pilot-operated
servo actuator. It is used where relatively large forces
are required to operate power control mechanisms, such
as turbine steam valves or the fuel control linkage of
large engines.
The rate at which the pilot valve plunger is moved
by the pressure on top of the compensation land is
When using a hydraulic amplifier in conjunction
controlled by the needle valve setting. It is adjusted to
with the EG-R actuator, a remote servo piston is not
match the rate at which the prime mover returns to
used. The various ports of the actuator (ports A, C, and
E) are directly connected to the amplifier with
normal speed.
9-7