
motors depends on the speed of the rotating magnetic
field (also known as the synchronous speed). The
synchronous speed depends on the following factors:
1. The number of magnetic poles in the motor, and
2. The frequency of the power supplied to it
This can be expressed mathematically as:
where: f= frequency of the voltage supplied to the
motor
N = synchronous speed
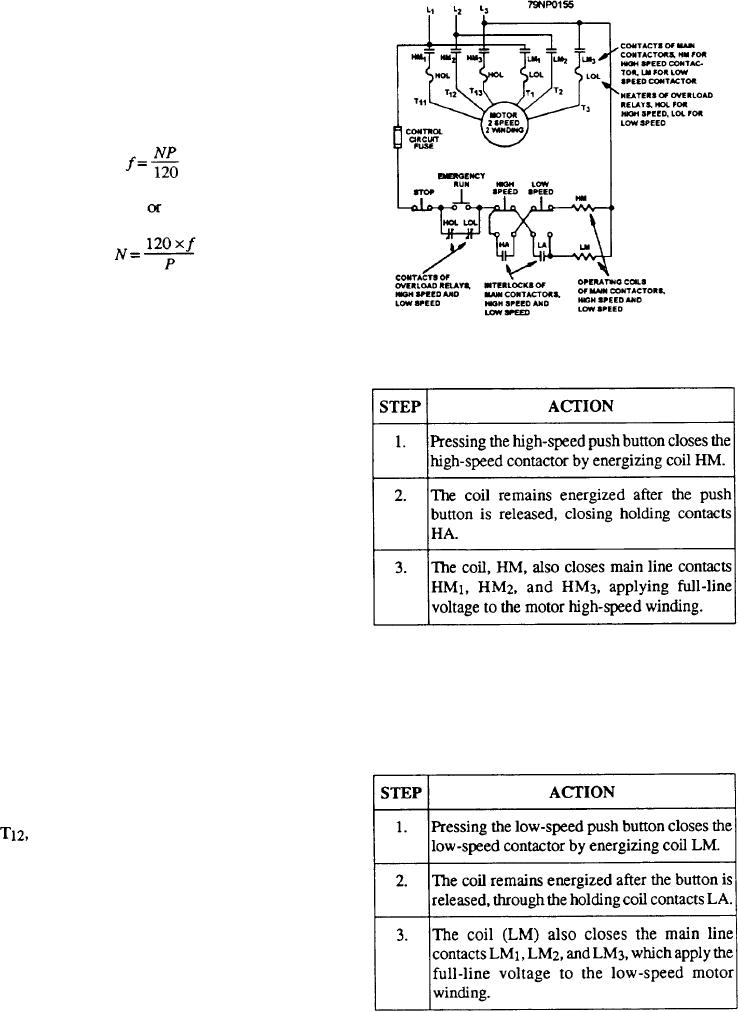
Figure 6-14.--Two-speed, ac controller.
P= number of magnetic poles in the stator
Table 6-3.--High-Speed Operation of a Two-speed AC Motor
Since it isn't desirable to change the frequency
throughout the ship to change motor speed, the speed of
ac motors is changed by altering the number of magnetic
poles. The number of magnetic poles in ac motors is
varied by changing connections to the motor through the
controller.
The speed of dc motors can be controlled by varying
the voltage to the motor. An arrangement of resistors is
used along with the controller to operate the motor at the
desired speed.
The motor will run at high speed until coil HM is
AC Speed Selection
de-energized either by opening the stop switch, a power
failure, or an overload.
An ac induction motor designed for two-speed
The Low-Speed operation of the controller is shown
operation may have either a single set of windings or
in table 6-4.
two separate sets of windings, one for each speed.
Figure 6-14 is a schematic diagram of the ac controller
Table 6-4.--Low-Speed Operation of a Two-Speed AC Motor
for a two-speed, two-winding induction motor. The
low-speed winding is connected to terminals T1, T2, and
T3. The high-speed winding is connected to terminals
T11,
and T13. Overload protection is provided by
the LOL coils and contacts for the low-speed winding
and the HOL contacts and coils for the high-speed
winding. The LOL and HOL contacts are connected in
series in the maintaining circuit, and both contacts must
be closed before the motor will operate at either speed.
The control push buttons are the
momentary-contact type. High-speed operation of the
controller in figure 6-14 is shown in table 6-3.
6-9