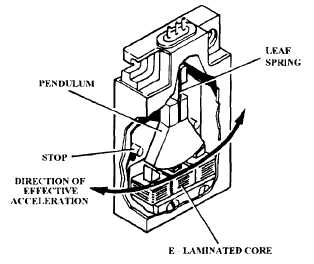
Figure 1-2 shows an E-transformer accelerometer,
while
figure
1-3
shows
a
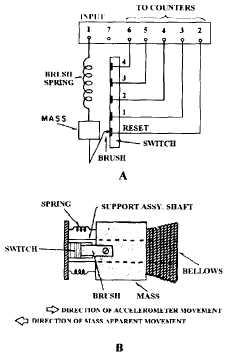
pulse
counting
accelerometer. Two accelerometers (orientated North-
South and East-West, respectively) are mounted on a
gyro-stabilized platform to keep them in a horizontal
position despite changes in ship’s movement. The
accelerometers are attached to the platform by an
equatorial mount (gimbal) whose vertical axis is
misaligned parallel to the earth’s polar axis. This
permits the N-S accelerometer to be aligned along a
longitude meridian and the E-W accelerometer to be
aligned along a latitude meridian.
Figure 1-2.—E-transformer accelerometer.
A three-gyro stabilized platform is maintained in
the horizontal position regardless of the pitch, roll, or
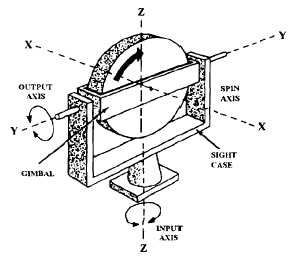
yaw of the ship. Figure 1-4 shows a gimbal-mounted
gyro. Ship’s heading changes cause the gyro signals
to operate servo system motors, which in turn keep
the platform stabilized.
High-performance servo
systems keep the platform stabilized to the desired
accuracy. (You will find in-depth information on
accelerometers, gyros, and servo systems in NEETS
Module 15, Principles of Synchros, Servos, and
Gyros.).
Maintaining this accuracy over long periods of
time requires that the system be updated periodically.
This is done by resetting the system using information
from some other navigation means; i.e., electronic,
celestial, or dead reckoning.
Figure 1-3.—Pulse counting accelerometer.
Several models of SINS are in use. In general,
AN/WSN-2 systems are installed on auxiliary ships,
AN/WSN-2A systems are installed on submarines,
and AN/WSN-5 systems are installed or being
installed on surface combatants. In the following
paragraphs, you will be introduced to the AN/WSN-5
SINS and its advantages over these earlier systems.
Figure 1-4.— Gimbal-mounted rate gyro.
1-4