(EOT). The length of tape between BOT and EOT is
refereed to as the usable recording surface or usable
storage area.
BOT/EOT markers are usually short strips of
reflective tape, as shown in figure 9-10. BOT is the
common starting point used in a system when writing
or searching for data on tape. Holes punched in the tape
or clear plastic inserts are used as markers in some units.
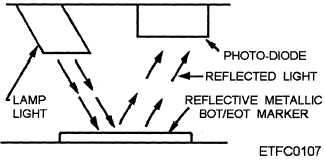
BOT/EOT markers are sensed by an arrangement of
lamps and photodiode sensors as shown in figure 9-11.
processing of large amounts of data. A data file is
nothing more than a group of records. Frames makeup
records, records make up files. Files are separated by
special identifying frames known as file marks,
end-of-file marks, or tape marks.
File marks are located at the end of each data file
on the tape. The first file starts after the start-of-tape
gap, as shown in figure 9-10. Notice the organization
of records and interrecord gaps within the file. The
second file starts after the first file mark. Following
files will each end in a file mark
Data Records on Tape
Parity Checks
One factor all magnetic tapes have in common is
that the tape must be moving at a predetermined speed
for data to be written on, or read from, the tape. In other
words, data cannot be written or read while the tape is
starting to move, stopping movement, or stopped.
This start/stop effect creates a blank spot on tape
until the tape is up to speed and can be written on. In
addition, these blank spots, or gaps, are used to separate
blocks of data or records on tape. Gaps separating
records are known as interrecord gaps. Refer to figure
9-10.
A record is nothing more than a group of contiguous
frames. The number of frames needed to store the
desired data determines the size of the record. The size
of a record may vary from a few frames to the entire
length of the usable recording surface. Record length
is a function of software (computer programs), not of
the magnetic tape device.
Data Files on Tape
Most magnetic tape devices provide for the
identification of files of data. Such identification
provides greater flexibility in the handling and
Figure 9-11.—A BOT/EOT sensor.
What are known as lateral parity and/or
longitudinal parity are common methods of ensuring
the accuracy of data recorded on tape. Lateral parity
checks use each frame’s parity bit. Longitudinal parity
checks use a special frame located at the end of each
record.
The two types of parity formats are odd parity and
even parity. Each of the data bits in a frame is written
as a ONE or a ZERO. Parity checks count the number
of binary ONES in the frame and store a ONE or ZERO
in the parity check bit to keep the total number of ONEs
in the frame odd or even.
As an example of odd parity, the six data bits to be
written as a frame (seven-track) consist of 010 011.
Three ONEs are in this frame. The total number of
ONES in the frame is already odd, so the parity bit will
be written as a ZERO. If the number of ONES in the
data bits were even (01 1 110), then the parity bit would
be written as a ONE to maintain odd parity. Odd parity
is commonly used with NRZI recording to distinguish
frames while reading. Since every frame will have at
least a single binary ONE, a flux change sensed on any
track indicates a frame.
As the frame is read from tape, the ONES in the data
bits read are summed; the result is compared with the
parity bit read. If the parity bit written on tape matches
the comparison bit, then the frame is assumed to contain
the correct data. If the comparison bit does not match
the parity bit written on tape, then a parity error has
occurred.
Lateral parity checks are designed to locate the loss
or addition of one bit of data in a frame. They are one
of the most common fault indications encountered by
technicians working on magnetic tape devices. Parity
errors can result from a variety of mechanical,
electrical, and environmental problems.
9-9